Next: 14 …ĹłĹĻ‘őů§»īūńž§ő —īĻĻ‘őů Up: 2 ņĢ∑ŃľŐŃŁ Previous: 12 ńĺłÚ —īĻ Contents
13 ≤ůŇĺį‹∆į
ő„ 2.61 (
 §ő≤ůŇĺ)
ńĺłÚ —īĻ
§ő≤ůŇĺ)
ńĺłÚ —īĻ
§ÚĻÕ§®§Ž°• §≥§őńĺłÚ —īĻ §Ō
§Ō
 ∆‚§ő
Ňņ§Úł∂Ňņ§Ú√śŅī§ň»ŅĽĢ∑◊≤ů§Í§ň≥—
∆‚§ő
Ňņ§Úł∂Ňņ§Ú√śŅī§ň»ŅĽĢ∑◊≤ů§Í§ň≥—  ≤ůŇĺį‹Ňĺ§Ú…ŧĻ°•
ńĺłÚĻ‘őů
≤ůŇĺį‹Ňĺ§Ú…ŧĻ°•
ńĺłÚĻ‘őů  §Ō
§Ō
 §ő≤ůŇĺĻ‘őů§»§§§¶°•
§ő≤ůŇĺĻ‘őů§»§§§¶°•
§»§™§Į°• ,
,  §Ō§Ĺ§ž§ĺ§ž
§Ō§Ĺ§ž§ĺ§ž
 ,
,  §Úł∂Ňņ§Ú√śŅī§ň
§Úł∂Ňņ§Ú√śŅī§ň  ≤ůŇĺ§Ķ§Ľ§Ņ
•Ŕ•Į•»•Ž§«§Ę§Ž°•
ľ°§ň°§«§į’§ő•Ŕ•Į•»•Ž
≤ůŇĺ§Ķ§Ľ§Ņ
•Ŕ•Į•»•Ž§«§Ę§Ž°•
ľ°§ň°§«§į’§ő•Ŕ•Į•»•Ž
§Ú §«ľŐ§Ļ§»
§«ľŐ§Ļ§»
§»…ŧĶ§ž§Ž°• §Ōīūńž
§Ōīūńž
 §ň§™§Ī§Ž
ļ¬…ł
§ň§™§Ī§Ž
ļ¬…ł  §őŇņ§«§Ę§Ž°•
łĶ§őŇņ
§őŇņ§«§Ę§Ž°•
łĶ§őŇņ  §Ō…łĹŗīūńž
§Ō…łĹŗīūńž
 §ň§™§Ī§Ž
ļ¬…ł
§ň§™§Ī§Ž
ļ¬…ł  §őŇņ§«§Ę§Ž§ő§«°§
§őŇņ§«§Ę§Ž§ő§«°§
 §Ōł∂Ňņ§Ú√śŅī§ň
§Ōł∂Ňņ§Ú√śŅī§ň  ≤ůŇĺ§∑§ŅŇņ§»§ §Ž°•
≤ůŇĺ§∑§ŅŇņ§»§ §Ž°•
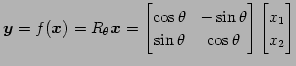 |
§ÚĻÕ§®§Ž°• §≥§őńĺłÚ —īĻ
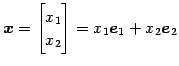
…łĹŗīūńž ![]() ,
, ![]() §Ú
§Ú ![]() §«ľŐ§∑§Ņ•Ŕ•Į•»•Ž§Ú
§«ľŐ§∑§Ņ•Ŕ•Į•»•Ž§Ú
 |
§»§™§Į°•
 |
§Ú
§»…ŧĶ§ž§Ž°•
Őš 2.62 (ńĺłÚĻ‘őů§»≤ůŇĺĻ‘őů)
 §Ú§Ŗ§Ņ§Ļ
§Ú§Ŗ§Ņ§Ļ  ∑Ņ§őľ¬Ļ‘őů§Ō≤ůŇĺĻ‘őů§ő§Ŗ§«§Ę§Ž°•
§≥§ž§Úľ®§Ľ°•
∑Ņ§őľ¬Ļ‘őů§Ō≤ůŇĺĻ‘őů§ő§Ŗ§«§Ę§Ž°•
§≥§ž§Úľ®§Ľ°•
ő„ 2.63 (
 §ő≤ůŇĺ)
ńĺłÚ —īĻ
§ő≤ůŇĺ)
ńĺłÚ —īĻ
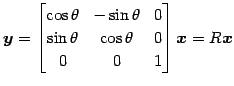
§ÚĻÕ§®§Ž°• §≥§őľŐŃŁ§Ō ľī§Ú√śŅī§ň
ľī§Ú√śŅī§ň  ≤ůŇĺ§Ú…ŧĻ°•
≤ůŇĺ§Ú…ŧĻ°•
 §Ť§Í
§Ť§Í  §ŌńĺłÚĻ‘őů§«§Ę§Ž°•
§ŌńĺłÚĻ‘őů§«§Ę§Ž°•
 |
§ÚĻÕ§®§Ž°• §≥§őľŐŃŁ§Ō
ő„ 2.64 (
 §ő≤ůŇĺ)
§ő≤ůŇĺ)
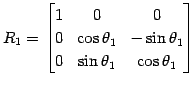
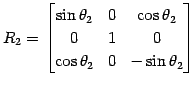
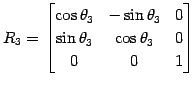
 ľī§ř§Ô§Í§ő≤ůŇĺ°ß
ľī§ř§Ô§Í§ő≤ůŇĺ°ß
 ľī§ř§Ô§Í§ő≤ůŇĺ°ß
ľī§ř§Ô§Í§ő≤ůŇĺ°ß
 ľī§ř§Ô§Í§ő≤ůŇĺ°ß
ľī§ř§Ô§Í§ő≤ůŇĺ°ß
 ,
,  ,
,  §ŌńĺłÚĻ‘őů§«§Ę§Ž°•
§ŌńĺłÚĻ‘őů§«§Ę§Ž°•
 |
 |
 |
![]() ľī§ř§Ô§Í§ň≤ůŇĺ§∑°§§Ĺ§őłŚ
ľī§ř§Ô§Í§ň≤ůŇĺ§∑°§§Ĺ§őłŚ ![]() ľī§ř§Ô§Í§ň≤ůŇĺ§Ķ§Ľ§Ž§»§≠°§
…ĹłĹĻ‘őů§Ō
ľī§ř§Ô§Í§ň≤ůŇĺ§Ķ§Ľ§Ž§»§≠°§
…ĹłĹĻ‘őů§Ō ![]() §«§Ę§Ž°•§≥§ž§‚§ř§ŅńĺłÚĻ‘őů§«§Ę§Ž°•
∆ĪÕÕ§ň
§«§Ę§Ž°•§≥§ž§‚§ř§ŅńĺłÚĻ‘őů§«§Ę§Ž°•
∆ĪÕÕ§ň ![]() ,
, ![]() ,
, ![]() §‚§ř§Ņ≤ůŇĺ§Ú…ŧĻ°•
§Ņ§ņ§∑°§
§‚§ř§Ņ≤ůŇĺ§Ú…ŧĻ°•
§Ņ§ņ§∑°§
![]() §«§Ę§Ž§≥§»§ň√Ūį’§Ļ§Ž§≥§»°•
≤ůŇĺ§Ļ§ŽĹÁ»÷§¨į„§®§–įا §Ž≤ůŇĺ§Ú…ŧĻ§ę§ť§«§Ę§Ž°•
§«§Ę§Ž§≥§»§ň√Ūį’§Ļ§Ž§≥§»°•
≤ůŇĺ§Ļ§ŽĹÁ»÷§¨į„§®§–įا §Ž≤ůŇĺ§Ú…ŧĻ§ę§ť§«§Ę§Ž°•
Next: 14 …ĹłĹĻ‘őů§»īūńž§ő —īĻĻ‘őů Up: 2 ņĢ∑ŃľŐŃŁ Previous: 12 ńĺłÚ —īĻ Contents
Kondo Koichi

Created at 2004/12/13