4.23 Ňņ§ő ŅŐŐ§ō§őľÕĪ∆ —īĻ
ő„ 4.104 (Ňņ§ő ŅŐŐ§ō§őľÕĪ∆)
 §ň§™§§§∆°§
«§į’§őŇņ
§ň§™§§§∆°§
«§į’§őŇņ
 §ę§ť ŅŐŐ
§ę§ť ŅŐŐ
§ō§őľÕĪ∆ —īĻ §ÚĶŠ§Š§Ž°•
żńÝľį(°ý)§őįž»Ő≤Ú§ÚĶŠ§Š§Ž§»
§ÚĶŠ§Š§Ž°•
żńÝľį(°ý)§őįž»Ő≤Ú§ÚĶŠ§Š§Ž§»
 §Ť§Í
§Ť§Í
§»§ §Ž°• ŅŐŐ(°ý)§Ō
§»…ŧĽ§Ž°• §őīūńž
§őīūńž
 §Ú
•į•ť•ŗ°¶•∑•Ś•Ŗ•√•»§őńĺłÚ≤Ĺň°§«ņĶĶ¨ńĺłÚīūńž≤ŧĻ§Ž°•
§Ú
•į•ť•ŗ°¶•∑•Ś•Ŗ•√•»§őńĺłÚ≤Ĺň°§«ņĶĶ¨ńĺłÚīūńž≤ŧĻ§Ž°•
§»§™§Į§» §»§ §Ž°•
§»§ §Ž°•
§Ō §őņĶĶ¨ńĺłÚīūńž§»§ §Ž°•
§≥§≥§«Ňņ
§őįŐ√÷•Ŕ•Į•»•Ž§Ú  §»§∑°§
ŅŐŐ§ōľÕĪ∆§∑§ŅŇņ§őįŐ√÷•Ŕ•Į•»•Ž§Ú
§»§∑°§
ŅŐŐ§ōľÕĪ∆§∑§ŅŇņ§őįŐ√÷•Ŕ•Į•»•Ž§Ú  §»§™§Į°•
ľÕĪ∆Ňņ §Ō ŅŐŐ ĺŚ§ň§Ę§Ž§ő§«°§
īūńž
§»§™§Į°•
ľÕĪ∆Ňņ §Ō ŅŐŐ ĺŚ§ň§Ę§Ž§ő§«°§
īūńž
 §ÚÕ—§§§∆°§
§ÚÕ—§§§∆°§
§»…ŧĽ§Ž°• §≥§ő§»§≠ ,
,
 §«§Ę§Í°§
§«§Ę§Í°§
 ,
,
 §¨ņģ§Íő©§ń°•
§≥§ž§Ť§Í
§¨ņģ§Íő©§ń°•
§≥§ž§Ť§Í
§»§ §Í°§ żłĢ§őļ¬…ł§Ō
żłĢ§őļ¬…ł§Ō
 §»∆ņ§ť§ž§Ž°•
§»∆ņ§ť§ž§Ž°•
 żłĢ§őļ¬…ł§‚
∆ĪÕÕ§ň§∑§∆
żłĢ§őļ¬…ł§‚
∆ĪÕÕ§ň§∑§∆
 §»∆ņ§ť§ž§Ž°•
§Ť§√§∆ľÕĪ∆Ňņ§Ō
§»∆ņ§ť§ž§Ž°•
§Ť§√§∆ľÕĪ∆Ňņ§Ō
§»§ §Ž°• ľÕĪ∆ —īĻ §¨
 §»∆ņ§ť§ž§Ņ°•
§»∆ņ§ť§ž§Ņ°•
§«§Ę§Í°§§≥§ž§Ú §«ľŐ§Ļ§»
§»§ §Ž°• §≥§≥§«°§
§Ť§Í°§
§»Ļ‘őů…Ĺľ®§Ú∆ņ§Ž°• §ő…łĹŗīūńž§ň§™§Ī§Ž…ĹłĹĻ‘őů§Ō
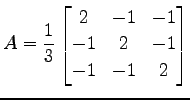
§»§ §Ž°•![\includegraphics[width=0.4\textwidth]{heimen-shaei.eps}](img2731.png)
§ō§őľÕĪ∆ —īĻ
 |
§»§ §Ž°• ŅŐŐ(°ý)§Ō
§»…ŧĽ§Ž°•
 |
§»§™§Į§»
 |
§Ō
§»…ŧĽ§Ž°• §≥§ő§»§≠
§»§ §Í°§
§»§ §Ž°• ľÕĪ∆ —īĻ
![]() §ÚĻ‘őů…Ĺľ®§Ļ§Ž°•
§ÚĻ‘őů…Ĺľ®§Ļ§Ž°•
![]() §ő«§į’§őŇņ
§ő«§į’§őŇņ ![]() §Ú…łĹŗīūńž
§Ú…łĹŗīūńž
![]() §«…ŧĻ§»°§
§«…ŧĻ§»°§
§«§Ę§Í°§§≥§ž§Ú
 |
§»§ §Ž°• §≥§≥§«°§
 |
§Ť§Í°§
 |
§»Ļ‘őů…Ĺľ®§Ú∆ņ§Ž°•
 |
§»§ §Ž°•
Őš 4.105 (ľÕĪ∆ —īĻ§őŃŁ§»≥¨ŅŰ)
 ,
,
 §»§ §Ž§≥§»§Úľ®§Ľ°•
§»§ §Ž§≥§»§Úľ®§Ľ°•
Őš 4.106 (ľÕĪ∆ —īĻ§ő≥ §»¬ŗ≤Ĺľ°ŅŰ)
ŅŐŐ(°ý)§őň°ņĢ•Ŕ•Į•»•Ž§Ō
 §«§Ę§Ž°•
§«§Ę§Ž°•
 §»§™§Į°•
§»§™§Į°•
 ,
,
 §»§ §Ž§≥§»§Úľ®§Ľ°•
§»§ §Ž§≥§»§Úľ®§Ľ°•
§«§Ę§Ž°•
√Ūį’ 4.107 (ľÕĪ∆ —īĻ§őņĶ¬ßņ≠)
 §«§Ę§Í
§«§Ę§Í  §Ō¬łļŖ§∑§ §§°•
§Ť§√§∆ľÕĪ∆ —īĻ §ŌņĶ¬ß —īĻ§«§Ō§ §§°•
ő„§®§–
§Ō¬łļŖ§∑§ §§°•
§Ť§√§∆ľÕĪ∆ —īĻ §ŌņĶ¬ß —īĻ§«§Ō§ §§°•
ő„§®§–
 (
(
 )
§ň¬–§∑§∆
)
§ň¬–§∑§∆
 §»§ §Ž°•
ńĺņĢ匧ő§Ļ§Ŕ§∆§őŇņ§¨ł∂Ňņ
§»§ §Ž°•
ńĺņĢ匧ő§Ļ§Ŕ§∆§őŇņ§¨ł∂Ňņ  §ňľŐ§Ķ§ž§Ž§ő§«°§
Ķ’łĶ
§ňľŐ§Ķ§ž§Ž§ő§«°§
Ķ’łĶ
 §Ō¬łļŖ§∑§ §§°•
§Ō¬łļŖ§∑§ §§°•
Őš 4.108 (ľÕĪ∆ —īĻ§ő…ĹłĹĻ‘őů§»§Ŕ§≠ŇýĻ‘őů)
 §¨ņģ§Íő©§ń§≥§»§Úľ®§Ľ°•
§¨ņģ§Íő©§ń§≥§»§Úľ®§Ľ°•
√Ūį’ 4.109 (ľÕĪ∆ —īĻ§ő…ĹłĹĻ‘őů§»§Ŕ§≠ŇýĻ‘őů)
 §ň¬–§∑§∆ľÕĪ∆ —īĻ §ÚļÓÕ—§Ķ§Ľ§Ž§»°§
§ň¬–§∑§∆ľÕĪ∆ —īĻ §ÚļÓÕ—§Ķ§Ľ§Ž§»°§
 §»§ §Ž°•
§Ō ŅŐŐ ĺŚ§ň§Ę§Í
§»§ §Ž°•
§Ō ŅŐŐ ĺŚ§ň§Ę§Í
 §«§Ę§Ž°•
§ň¬–§∑§∆§Ķ§ť§ň §ÚļÓÕ—§Ķ§Ľ§Ž§»
§«§Ę§Ž°•
§ň¬–§∑§∆§Ķ§ť§ň §ÚļÓÕ—§Ķ§Ľ§Ž§»
 §»§ §Ž°•
§ŌīŻ§ň ŅŐŐ ĺŚ§ň§Ę§Ž§ő§« §ň§Ť§Í∆į§ę§ §§°•
§Ť§√§∆
§»§ §Ž°•
§ŌīŻ§ň ŅŐŐ ĺŚ§ň§Ę§Ž§ő§« §ň§Ť§Í∆į§ę§ §§°•
§Ť§√§∆
 §«§Ę§Ž§ę§ť°§
§«§Ę§Ž§ę§ť°§
 §»§ §Ž°•
«§į’§ő §ň¬–§∑§∆ņģ§Íő©§ń§ő§«°§ §Ú∆ņ§Ž°•
§Ú§Ŗ§Ņ§ĻĻ‘őů§Ú§Ŕ§≠ŇýĻ‘őů§»§§§¶°•
įž»Ő§ň§Ŕ§≠ŇýĻ‘őů§Ú…ĹłĹĻ‘őů§ň§‚§ńņĢ∑Ń —īĻ§ŌľÕĪ∆ —īĻ§»§ §Ž°•
§»§ §Ž°•
«§į’§ő §ň¬–§∑§∆ņģ§Íő©§ń§ő§«°§ §Ú∆ņ§Ž°•
§Ú§Ŗ§Ņ§ĻĻ‘őů§Ú§Ŕ§≠ŇýĻ‘őů§»§§§¶°•
įž»Ő§ň§Ŕ§≠ŇýĻ‘őů§Ú…ĹłĹĻ‘őů§ň§‚§ńņĢ∑Ń —īĻ§ŌľÕĪ∆ —īĻ§»§ §Ž°•
√Ūį’ 4.110 (ľÕĪ∆ —īĻ§ň§™§Ī§ŽńĺłÚ š∂űī÷)
 ,
,  §«§Ę§Ž§≥§»§»°§
§«§Ę§Ž§≥§»§»°§
 §¨ 1 ľ°∆»ő©§«§Ę§Í
§¨ 1 ľ°∆»ő©§«§Ę§Í
 §»§ §Ž§≥§»§ę§ť°§
§»§ §Ž§≥§»§ę§ť°§
§Ú∆ņ§Ž°• §Ķ§ť§ň°§ ,
,
 §«§Ę§Ž§ę§ť°§
§»
§«§Ę§Ž§ę§ť°§
§»  §ŌłŖ§§§ň
§ň§™§Ī§ŽńĺłÚ š∂űī÷§»§ §Ž°•
§ŌłŖ§§§ň
§ň§™§Ī§ŽńĺłÚ š∂űī÷§»§ §Ž°•
§«§Ę§Ž°•
§Ú∆ņ§Ž°• §Ķ§ť§ň°§
§«§Ę§Ž°•
√Ūį’ 4.111 (ľÕĪ∆ —īĻ§őł«Õ≠√Õ∂űī÷)
 §ő§»§≠°§
§ŌīŻ§ň ŅŐŐ ĺŚ§ň§Ę§Ž§ő§«°§
ľÕĪ∆ —īĻ §ň§Ť§Í∆į§Į§≥§»§Ō§ §§°•
§Ļ§ §Ô§Ń°§
§ő§»§≠°§
§ŌīŻ§ň ŅŐŐ ĺŚ§ň§Ę§Ž§ő§«°§
ľÕĪ∆ —īĻ §ň§Ť§Í∆į§Į§≥§»§Ō§ §§°•
§Ļ§ §Ô§Ń°§
§¨ņģ§Íő©§ń°• §≥§ž§Ōł«Õ≠√Õ §ő
ł«Õ≠ żńÝľį
§ő
ł«Õ≠ żńÝľį
 §»§Ŗ§ §Ľ§Ž°•
§ř§Ņ§Ō°§
—īĻ §ň§Ť§Í
•Ŕ•Į•»•Ž §ő•Ļ•ę•ť°ľ «‹§ňľŐ§Ķ§ž§Ž§»§‚§Ŗ§ §Ľ§Ž°•
§Ļ§Ŕ§∆§ő
§ň¬–§∑§∆ņģ§Íő©§ń§ő§«°§
§Ōł«Õ≠∂űī÷
§»§Ŗ§ §Ľ§Ž°•
§ř§Ņ§Ō°§
—īĻ §ň§Ť§Í
•Ŕ•Į•»•Ž §ő•Ļ•ę•ť°ľ «‹§ňľŐ§Ķ§ž§Ž§»§‚§Ŗ§ §Ľ§Ž°•
§Ļ§Ŕ§∆§ő
§ň¬–§∑§∆ņģ§Íő©§ń§ő§«°§
§Ōł«Õ≠∂űī÷  §»Ňý§∑§§°•
§ř§Ņ°§
§»Ňý§∑§§°•
§ř§Ņ°§
 §Ť§Í
§Ō
§» §ňńĺŌ¬ ¨≤Ú§Ķ§ž§Ž°•
§Ť§Í
§Ō
§» §ňńĺŌ¬ ¨≤Ú§Ķ§ž§Ž°•
 §«§Ę§Ž§ę§ť°§
§‚ł«Õ≠∂űī÷
§«§Ę§Ž§ę§ť°§
§‚ł«Õ≠∂űī÷
 §»§ §Ž° §Ō§ļ§«§Ę§Ž°ň°•
§»§ §Ž° §Ō§ļ§«§Ę§Ž°ň°•
 §ő§»§≠°§
ŅŐŐ §őł∂Ňņ §ÚńŐ§Žň°ņĢ匧ň §¨§Ę§Ž§ő§«°§
§Ō
ľÕĪ∆ —īĻ §ň§Ť§Íł∂Ňņ §ňľŐ§Ķ§ž§Ž°•
§≥§ž§Ō°§
—īĻ §ň§Ť§Í
•Ŕ•Į•»•Ž §ő•Ļ•ę•ť°ľ
§ő§»§≠°§
ŅŐŐ §őł∂Ňņ §ÚńŐ§Žň°ņĢ匧ň §¨§Ę§Ž§ő§«°§
§Ō
ľÕĪ∆ —īĻ §ň§Ť§Íł∂Ňņ §ňľŐ§Ķ§ž§Ž°•
§≥§ž§Ō°§
—īĻ §ň§Ť§Í
•Ŕ•Į•»•Ž §ő•Ļ•ę•ť°ľ
 «‹§ňľŐ§Ķ§ž§Ž§»§‚§Ŗ§ §Ľ§Ž°•
§Ť§√§∆°§
«‹§ňľŐ§Ķ§ž§Ž§»§‚§Ŗ§ §Ľ§Ž°•
§Ť§√§∆°§
 §»§ §Ž° §Ō§ļ§«§Ę§Ž°ň°•
§»§ §Ž° §Ō§ļ§«§Ę§Ž°ň°•
§¨ņģ§Íő©§ń°• §≥§ž§Ōł«Õ≠√Õ
Őš 4.112 (ľÕĪ∆ —īĻ§őł«Õ≠√Õ∂űī÷)
§őł«Õ≠∂űī÷§Ú∂٬őŇ™§ňĶŠ§Š§∆°§
,  §¨ņģ§Íő©§ń§≥§»§Úľ®§Ľ°•
§¨ņģ§Íő©§ń§≥§»§Úľ®§Ľ°•
Ņņģ20«Į2∑Ó2∆Ł