5.6
 における線形変換の固有空間
における線形変換の固有空間
例 5.17 (線形変換の固有空間の具体例)
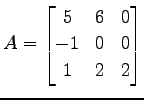
線形変換
 ;
;
 の固有空間を求める.
ただし,
の固有空間を求める.
ただし,
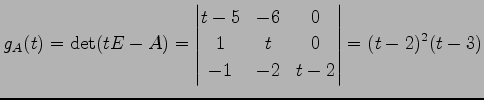
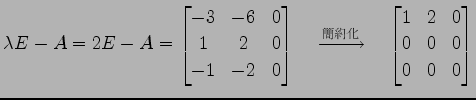
とする. まず,固有多項式は
である.よって より
固有値は
より
固有値は  ,
,  (2 個)である.
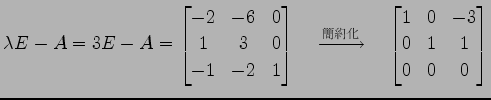
のとき
(2 個)である.
のとき
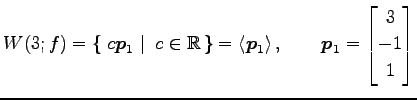
より,固有空間は
となる. のとき
より,固有空間は
となる.
より は 1 次独立であり,
は 1 次独立であり,
であるので,
が成り立つ. は  と
と  に直和分解される.
は
の基底となる.
に直和分解される.
は
の基底となる.
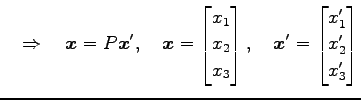
と座標変換が得られる. これを用いて, 線形変換 を座標変換すると
を座標変換すると
と表される. よって,基底 に関する
に関する
 の表現行列は
の表現行列は
となる. また,あらたな座標 のもとでの
は
のもとでの
は
 より
より
と表される.
 |
とする. まず,固有多項式は
 |
である.よって
 |
より,固有空間は
 |
となる.
 |
より,固有空間は
 |
となる.
![]() の基底は
の基底は
![]() であり
であり
![]() となる.
となる.
![]() の基底は
の基底は
![]() であり
であり
![]() となる.
また,
となる.
また,
 |
より
であるので,
が成り立つ.
標準基底
![]() に関する
に関する ![]() の表現行列は
の表現行列は ![]() である.
基底
である.
基底
![]() に関する
に関する ![]() の表現行列を求める.
の表現行列を求める.
![]() ,
, ![]() の座標を
の座標を
![]() ,
,
![]() とすると,
とすると,
 |
||
 |
と座標変換が得られる. これを用いて, 線形変換
と表される. よって,基底
 |
となる. また,あらたな座標
と表される.
平成20年2月2日