5.28 交代行列の対角化
定義 5.84 (交代行列)
行列
 が
が
 をみたすとき,
をみたすとき,
 を
歪対称行列(skew-symmetric matrix)または
交代行列(alternative matrix)という.
を
歪対称行列(skew-symmetric matrix)または
交代行列(alternative matrix)という.
例 5.85 (交代行列の具体例)
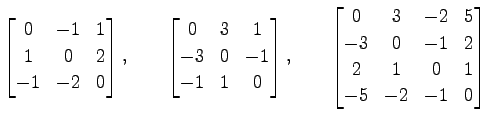 |
定理 5.86 (交代行列の固有値)
交代行列の固有値はすべて純虚数または 0 である.
が成り立つ. ここで, となることを用いた.
これらを比較すると
となることを用いた.
これらを比較すると
 となる.固有ベクトル
となる.固有ベクトル  は
は  とはならないから,
とはならないから,
 が成立する.
このとき
が成立する.
このとき  は純虚数である.
は純虚数である.
(証明)
行列 ![]() の固有値を
の固有値を ![]() としその固有ベトクルを
としその固有ベトクルを ![]() とする.
すなわち
とする.
すなわち
![]() が成り立つとする.
このとき,
が成り立つとする.
このとき,
![]() 上の内積を用いて,
上の内積を用いて,
が成り立つ. ここで,
注意 5.87 (交代行列)
交代行列は正規行列である.
定理 5.88 (交代行列の固有ベクトル)
交代行列において,
異なる固有値に属する固有ベクトルは直交する.
となる.
であるから, より
より
 を得る.
を得る.
(証明)
交代行列は正規行列であるから固有ベクトルは直交する.
または,次のように示す.
![]() において,
固有値は純虚数なので
において,
固有値は純虚数なので
![]() ,
,
![]() ,
,
![]() (
(
![]() ) とする.
) とする.
![]() 上の内積を用いて
上の内積を用いて
となる.
であるから,
定理 5.89 (交代行列の対角化)
交代行列
の
固有値を
 とする.
このとき, は
ユニタリー行列
とする.
このとき, は
ユニタリー行列
 を用いて
を用いて
と 上で対角化される.
ただし,
上で対角化される.
ただし,
 は
の固有ベクトルであり,
は
の固有ベクトルであり,
 がユニタリー行列となるように選ぶとする.
がユニタリー行列となるように選ぶとする.
 |
と
定理 5.90 (交代行列の実標準形)
交代行列
の
固有値を
とする. このとき, は
直交行列
 を用いて
を用いて
と実標準形でブロック対角化される. ただし, は
の固有ベクトルであり,
は
の固有ベクトルであり,
 が直交行列となるように選ぶとする.
が直交行列となるように選ぶとする.
とする. このとき,
![$\displaystyle D= \begin{bmatrix}R(\lambda_1)\!\! \\ [-.8ex] & \!\!R(\lambda_2)\...
...in{bmatrix}0 & -\mathrm{Im}(\lambda) \\ \mathrm{Im}(\lambda) & 0 \end{bmatrix},$](img3418.png) |
||
 |
と実標準形でブロック対角化される. ただし,
例 5.91 (交代行列の対角化の具体例)
行列
を対角化する.
より,固有値は である.
である.
より,固有ベクトルはそれぞれ
となる.これより
と 上で対角化される.
また,
 上で実標準形では
上で実標準形では
となる.
 |
を対角化する.
 |
より,固有値は
 |
より,固有ベクトルはそれぞれ
 |
となる.これより
 |
と
 |
となる.
平成20年2月2日